The Lego Rover Activity
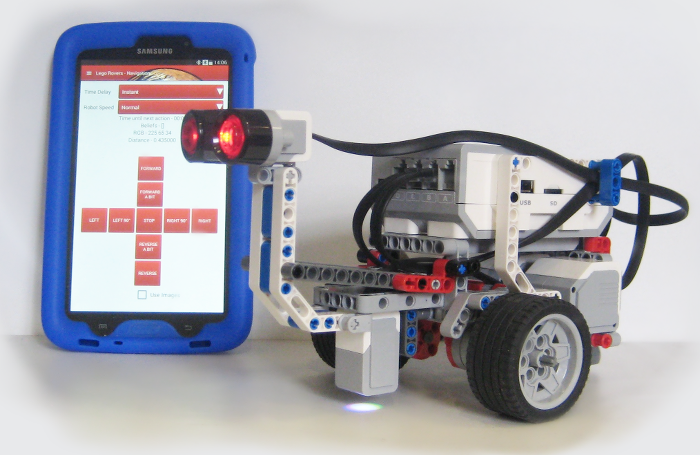
Teleoperation of a Lego Rover
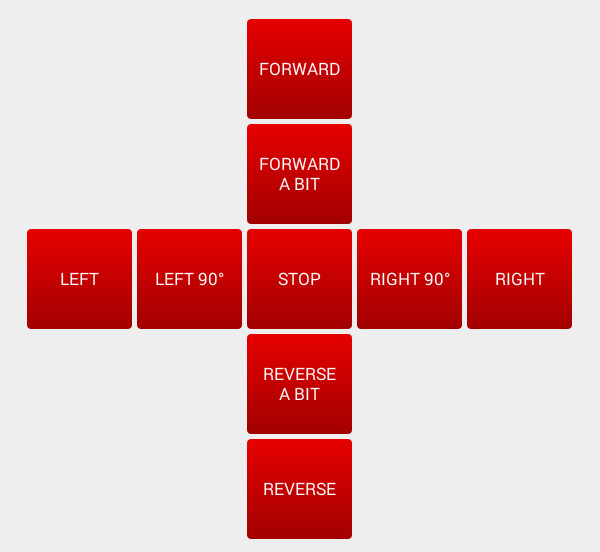
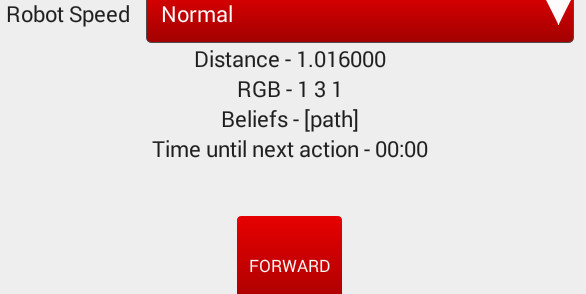
A simple interface on an Android tablet allows a user to drive a Lego robot forwards and backwards and to turn it left, right or stop it. The travel and turning speeds can be varied, allowing users to experiment with the compromises between speed and control.
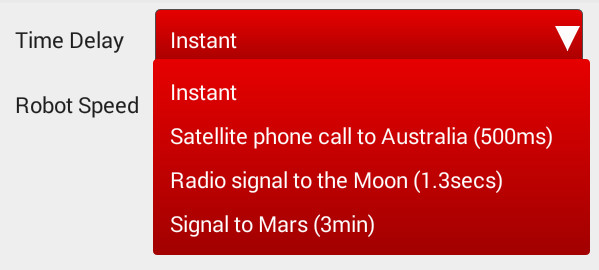
Introducing a Time Delay
A time delay can be introduced to the teleoperation. This delay can be 0.5s (the time it takes for a satellite call between the UK and Australia), 1s, 1.3s (the time it takes for a radio signal to pass between the Earth and the Moon) and 3 minutes (the minimum possible time for a signal to travel between the Earth and Mars).
The 1.3s delay (Earth to Moon) introduces significant challenges in the control of the robot while still giving rapid feedback to user controls. It is this time delay that is typically used for the bulk of the activity.
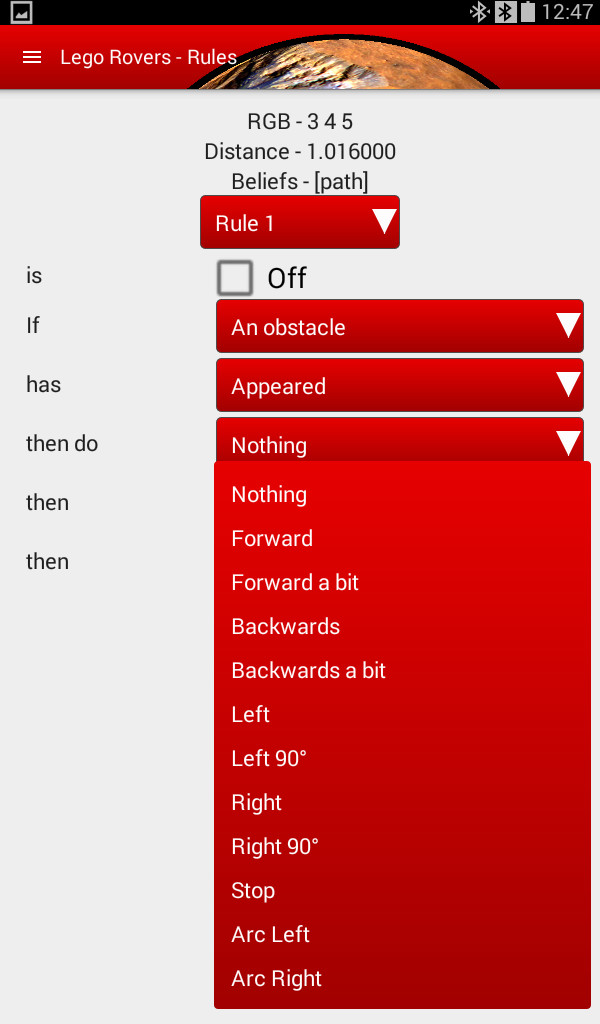
Controlling the Robot with Rules
Rules can be introduced which allow the robot to drive itself. The interface shows the input from sensors (such as an ultrasonic sensor which detects distances), and the rules convert this information into beliefs, such as “there is an obstacle”, and then define appropriate responses, such as stopping or reversing.
Experimenting with the ultrasonic distance sensor.